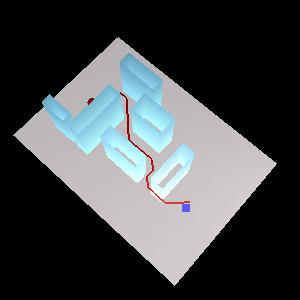
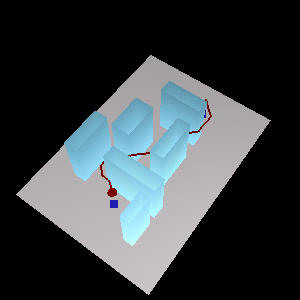
Here are two screenshots of an OpenGL visualization of our path planner for a simple disk-shaped Robot moving within a simple maze.
Here is a screenshot of an OpenGL visualization of our path planner for a SCARA Robot Arm in a silicon wafer handling application. The path planning for this robot is considerably more complicated since it is kinematically redundant and the configuration of the robot changes as it moves.

The path planner has determined how to set the arm angles in order to move the silicon wafer from the starting station on the right to the destination on the left. It is able to find a path (in yellow), so that neither the arm nor the silicon wafer disk collide with any objects in the workspace.
Motion planning requires developing both forward and inverse kinematic models of the robot. Again, there is a considerable amount of material published on this topic. I recommend: Murray, R.M, Z. Li, and S.S Sastry; 1994; A Mathematical Introduction to Robotic Manipulation, CRC Press, Boca Raton Fl. USA, ISBN 0-8493-7981-4
If you plan on implementing a robot motion or path planner, then you will need some computational geometry resources. I found the following to be exteremly useful: O'Rourke J., 1998; Computational Geometry in C, Cambridge University Press, Cambridge UK, ISBN 0-521-64010-5
|
|