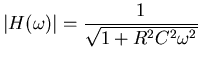
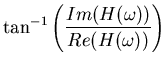
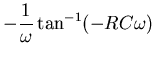
Anti-aliasing filters are frequently implemented as simple R-C filters like in Figure 1. This filter is not that great as filters go, the rate of attenuation of the higher frequencies is rather slow. The fraction of the signal passed through the filter as a function of frequency is called the magnitude response. The magnitude response curve is an important measure of the quality and suitability of a filter. Unfortunately, it is often used as the only measure. There is another measure that can be just as important to consider, the frequency dependent effect the filter has upon the phase of the signal. This is the phase response. The phase response information is most useful in two forms, the phase delay and the group delay. The phase delay is just a dimensional form of the phase response, it gives the amount of time a signal of a given frequency is delayed by the filter. The group delay describes something slightly different. Suppose our signal is like an FM radio signal, that is being modulated in frequency around a basic frequency. The modulation can be thought of as another signal (the envelope) riding on top of the basic frequency (the carrier). The phase delay of the envelope is not generally the same as the phase delay of the carrier. The group delay gives the delay time of the envelope. So to properly judge the suitability of a given filter we really need to check all three functions: the magnitude response, the phase delay and the group delay. As you might expect, all filters give up performance in one of the three functions in order to gain in another. The best compromise depends upon your application.
All of these filter characteristics can be derived from the filters
transfer function. This is a complex function (that is, it
contains complex numbers in it) and takes a bit of mathematics to
be able to derive for an aribitrary filter. I will only give you
the results here for the low-pass RC filter. If you are interested
in learning more about this, Horowitz and Hill contains a readable
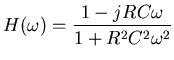
introduction to the topic. The low-pass RC filter has a the
transfer function,
 |
 |
 |
|||
 |
|||
 |
 |
|||
 |
With the anti-aliasing filter in place, we still need to decide upon the proper sampling rate. You might recall reading elsewhere about something called the Nyquist sampling theorem. This theorem is what we want, it tells us that the sample rate must be at least twice the bandwidth of the signal in order to avoid aliasing. Notice that I said bandwidth, which is the range from the lowest to the highest frequency (in the simplest case, where there are no gaps) in the signal. The Nyquist theorem is widely misquoted as stating that we must sample at twice the highest frequency of the signal. The bandwidth and the highest frequency are not the same thing unless we are dealing with a base band signal (one that has content from a frequency of zero all the way up to the highest frequency). The distinction can be quite important. Consider the following real-life example. In the RAFOS subsurface ocean drifter, that I helped develop, we navigate the float by listening to a tone emitted by a pre-placed acoustic beacon mooring. These beacons output a long tone that sweeps in frequency from 258.5 to 261.5 Hertz. The bandwidth of this tone is the range of the sweep, 3 Hertz. So the Nyquist theorem states that we need a sampling rate of at least 6 Hertz, not at twice the highest frequency of 261.5 Hz (523 Hz). As a result, the RAFOS float can comfortably oversample the signal at 10Hz using a lowly 6805 microprocessor. Erroneously sampling at 523 Hz would have required a faster processor, which would have required more electrical power which, in turn, would make the instrument an impractical device (the drifter runs on batteries and has mission times measured in months, 48 being our current record).
If we are uniformly sampling a signal at the proper rate, and there is no aliased signal contaminating our measurement, then we can recover the value of the signal at any time. To do this we need to do a convolution of our samples with the sinc function (this is the uniform sampling theorem),
 |
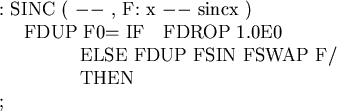
A Forth implementation of the sinc function is,
By the way, if you look up equations like these in the literature
I can guarantee you will have a horrible time reconciling factors
of ![]() , 2, and -1 ( this is generally known as the
, 2, and -1 ( this is generally known as the ![]() throwing
contest. Where did the
throwing
contest. Where did the ![]() go ?). In the mathematics literature
these factors tend to be missing from the equations altogether.
In the engineering literature they are in different places in
different books.
The reason is that such factors are immaterial as far as the
mathematical theory of all this is concerned, they are just
normalization and dimensionalization factors. In the engineering
context, there is no one way to do normalization and
dimensionalization they just need to be done
self consistently; so one books version can differ from anothers.
go ?). In the mathematics literature
these factors tend to be missing from the equations altogether.
In the engineering literature they are in different places in
different books.
The reason is that such factors are immaterial as far as the
mathematical theory of all this is concerned, they are just
normalization and dimensionalization factors. In the engineering
context, there is no one way to do normalization and
dimensionalization they just need to be done
self consistently; so one books version can differ from anothers.
Now that we are armed with the uniform sampling theorem, we can do a little experiment to demonstrate what I said about sampling a bandlimited signal. Listing 2, gensig.fth is a program that will generate a test signal that starts at one frequency and slides up to another (a chirp). I have set things up so that the simulated signal sweeps from 10 Hz to 12 Hz in 4.5 seconds. When the constant SAMPLING? is FALSE then the output is at the equivalent of 128 samples per second.
A subsample of the output of this program is what we will be using as data, a plot is shown in Figure 2. This signal has a bandwidth of 2 Hz, so the Nyquist sampling rate is 4 Hz. We will oversample and sample at 6.4 Hz. Now we can't just take every 20th sample from the data in Figure 2 to use as our measurement data; such a signal would contain a serious amount of aliasing in it. To make the signal usable, we will mix it with an 11 Hz signal and then apply a low-pass filter with a 5 Hz cut-off to the result.
Why do we do that ? From elementary trigonometry,
The output for the sampling case are the simulated measurements that we want to use the uniform sampling theorem upon. The code in regen.fth (listing 3) reads the data and applies the theorem to it. Comparing the output of regen with its input we see a smoother result as one might expect. In order to see what we theoretically expect, go back and run gensig with SAMPLING? set to FALSE and the minimum and maximum frequencies set to -1.0 and 1.0 respectively. Running gensig this way generates the reference signal without the 11Hz carrier.
Comparing the carrier free signal with the reconstructed signal (figure 3), we see that we generally do pretty well. There are two problems that we can see with our reconstruction: